傕偭偲傕擄偟偄抜奒偱偡丅崅峑棟壢偱廗偭偨偙偲傪戣嵽偵偡傞偲傛偄偱偟傚偆丅
Research Proposal 偵帵偟偨幚尡偲堎側傞幚尡傪峴偆偙偲偼偱偒傑偡
偑丆偙偺嵺偼abstract側偳傪彂偔偲偒偵堦偐傜幚尡奣梫傪彂偐側偔偰偼偄偗側偔側傝傑偡丅
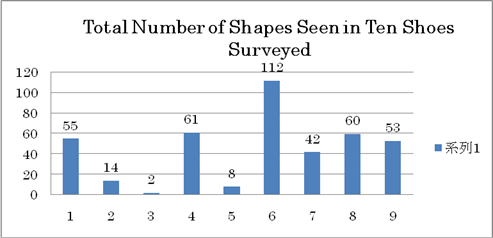
偙偙偱偼丆乽愙怗柺偺宍偲杸嶤學悢乿偵偮偄偰挷傋傑偟偨丅
The coefficient of friction (COF) measured in this experiment is defined in Wikipidia (3 December, 2008) as the ratio of the friction to the normal force, the perpendicular force compressing two parallel surfaces together. For the COF of static friction, the maximum friction force applied before the surfaces slide is used. It is used to approximate the value of friction between any two given surfaces; generally the COF of static friction is greater than that of kinetic. The COF varies depending on the temperature and the velocity of sliding on the surface, whereas it is independent of surface area.
Out of ten random shoe soles I surveyed[i], lines were the most common pattern found on shoe soles, with an average of 11.2 lines per shoe, followed by trapezoids and circles with 6.1 and 6.0 shapes per shoe, respectively. Rectangles and squares were often seen in clusters with a relatively high average of 5.5 and 5.3 shapes per shoe, respectively. Despite the fact that some sport shoe soles consist only of hexagons, hexagons were least recorded with an average of 0.2 hexagons per shoe. Semicircular shapes, typically used in high heel soles, had a low average of 0.8 semicircular shapes per shoe in the rest, mostly used to fill in empty spaces.
[i] References for Shoe Sole Survey [All Accessed 3 December 2008]
Making quality mens leather shoes information on rubber soles: <http://www.mckinlays.co.nz/info/info_soles.html>
GERMES Online: <http://www.germes-online.com/catalog/69/74/255/page6/19031/shoe_sole.html>
Rubber combined with EVA foam for shoe sole:<http://www.allproducts.com/manufacture97/meay/product1.html>
white/pink ridged reebok classic sole on Flicker:<http://flickr.com/photos/10651509@N08/2492740116>
Sneaker Freaker Magazine: <http://www.sneakerfreaker.com/brendan/1191069968/>
Safety Shoe Sole, Pvc Shoe Sole, Shoe Sole Manufacturers, Pvc Shoe Sole Suppliers: <http://www.arvindfootwear.net/safety-shoe-soles.html>
Sneaker
Design Idea: The Carbon Footprint Shoe :Meme Menagerie:
<http://danspira.wordpress.com/2008/04/17/sneaker-design-idea-the-carbon-footprint-shoe/>